
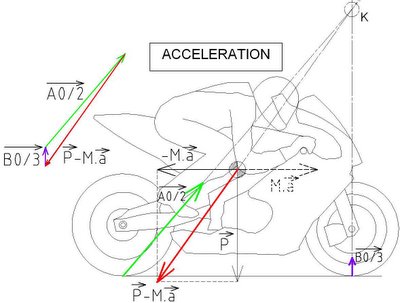
D'après le principe de la dynamique, la somme des forces appliquées est égale au produit de la masse par le vecteur accélération. On peut ramener ceci à un problème de "statique" à 3 forces concourantes (merci M. d'Alembert) en regroupant en une force le poids P et (- M.a).
en vert : au point A, la force du sol sur le pneu arrière,
en violet : au point B, la force du sol sur le pneu avant,
en rouge : au point G (centre de gravité), la force P-M.a (en vecteurs)
La somme vectorielle des 3 forces devant être nulle, on obtient le triangle ci-dessus quand on place les vecteurs bout-à-bout.
Voilà traité le cas de l'accélération (en négligeant les effets aérodynamiques).
On remarque (comme indiqué au paragraphe "adhérence") que la composante horizontale de la force verte est égale à M.a.
Donc plus on accélère, plus la force verte est penchée vers l'avant. En même temps, la force violette diminue quand l'accélération augmente. Le wheeling est obtenu quand cette force devient nulle. A ce moment, tout le poids est reporté sur l'arrière (transfert maxi) et on obtient deux forces opposées, sur la même droite support (AG).
La force verte ne peut pas être inclinée plus loin que cette droite (AG).
Si on cherche à accélérer plus fort, le wheeling ayant été amorcé, la moto se cabre de plus en plus, le centre de gravité "recule" de plus en plus, amplifiant le wheeling et on fait un beau soleil. Si on prend en plus en compte les effets aérodynamiques lorsque la moto est cabrée, on comprend bien qu'on peut se retourner comme une crêpe (demandez à un certain pilote Kawa lors du Bol 2005 !).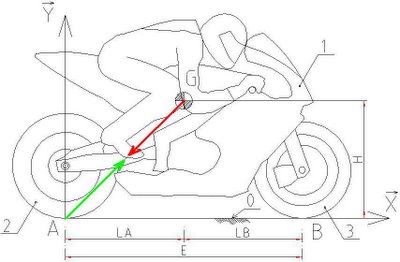
Aucun commentaire:
Enregistrer un commentaire