
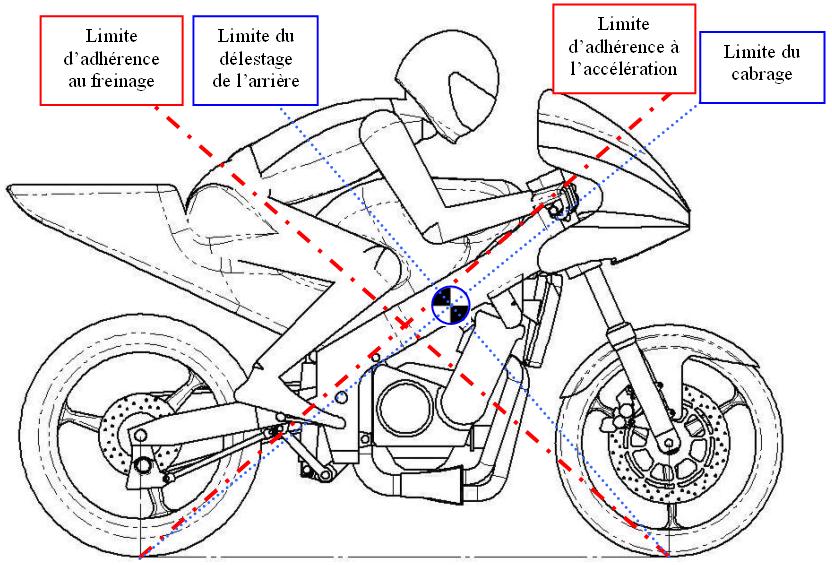
Nous avons vu les limites physiques (perte d'adhérence et cabrage) de la moto à l'accélération. Nous retrouvons les mêmes limites au freinage : perte d'adhérence (du pneu avant) ou décollage de la roue arrière. En pratique, sur les motos de GP actuelles, c'est plutôt la 2ème limite qui est atteinte. Les figures d'équilibriste sur la roue avant, roue arrière à quelques centimètres du sol, sont assez fréquentes en entrée de virage.

La différence entre ces deux études mécaniques, c'est que l'on peut freiner des deux roues alors que la roue arrière est la seule roue motrice (à de rares exceptions près). On considérera que les capacités d'adhérence de l'arrière et de l'avant sont identiques. Ce n'est sans doute pas exact mais pas vraiment gênant dans la mesure où l'essentiel du travail est réalisé par le pneu avant.

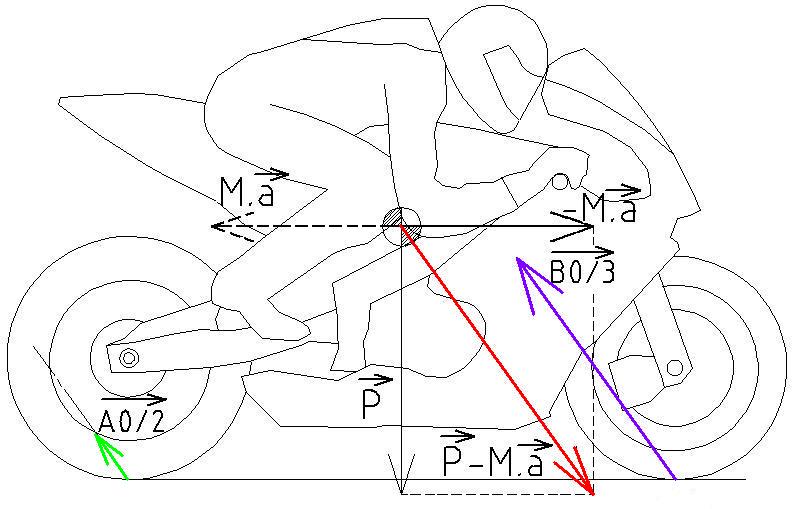
Comme pour l'étude de l'accélération, on ramène le problème à un équilibre sous l'action de 3 forces. Mais dans ce cas, ces 3 forces sont parallèles. On retrouve sur le schéma ci-contre :
en vert : au point A, la force du sol sur le pneu arrière,
en violet : au point B, la force du sol sur le pneu avant,
en rouge : au point G, la force "P-M.a", inclinée vers l'avant du fait du freinage.
Si

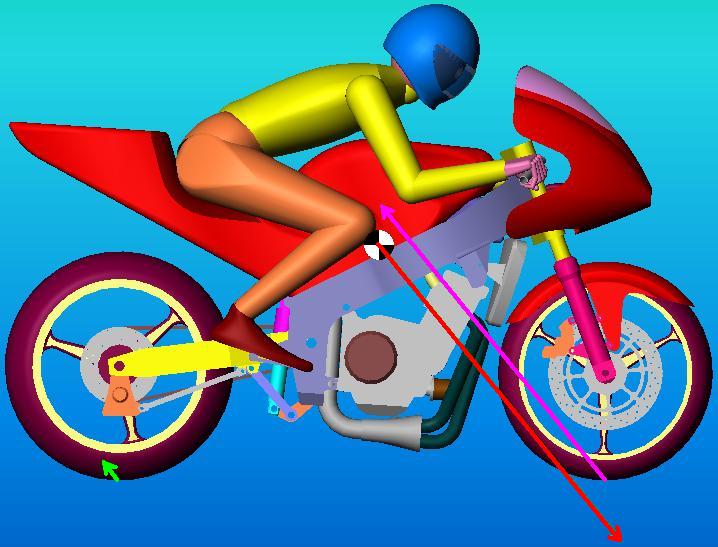
l'intensité du freinage augmente, les forces s'inclinent encore plus. L'intensité de la force en A diminue alors qu'elle augmente en B. On atteint la limite lorsque la force est nulle en A (la roue arrière ne s'appuie plus sur le sol) et que toute la charge "P-M.a" se reporte en B sur la roue avant. La moto est alors "en équilibre" (elle roule quand même !) sous l'action de deux forces, opposées et dirigées suivant la même droite (BG). C'est la situation limite la plus fréquente, sur piste sèche.


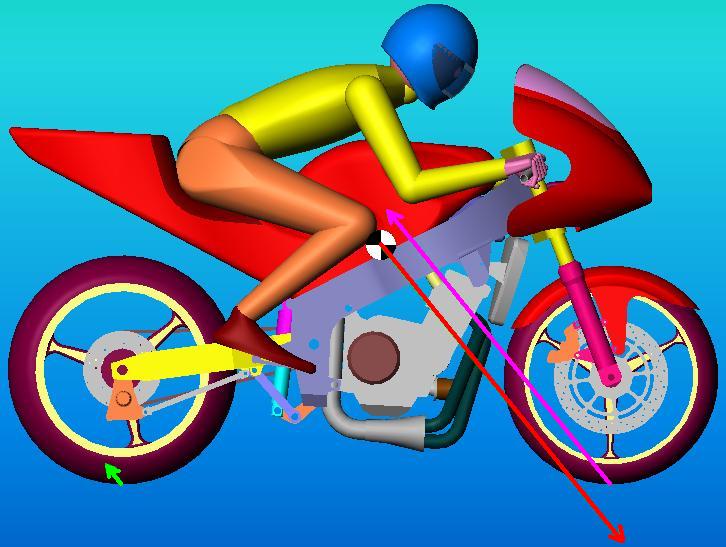
Mais, si l'adhérence est faible, on atteint la perte d'adhérence avant le décollage de l'arrière. C'est ce qui arrive si la géométrie est celle du schéma ci-dessous :






 Son bébé : la RenNa.
Son bébé : la RenNa.










 l'intensité du freinage augmente, les forces s'inclinent encore plus. L'intensité de la force en A diminue alors qu'elle augmente en B. On atteint la limite lorsque la force est nulle en A (la roue arrière ne s'appuie plus sur le sol) et que toute la charge "P-M.a" se reporte en B sur la roue avant. La moto est alors "en équilibre" (elle roule quand même !) sous l'action de deux forces, opposées et dirigées suivant la même droite (BG). C'est la situation limite la plus fréquente, sur piste sèche.
l'intensité du freinage augmente, les forces s'inclinent encore plus. L'intensité de la force en A diminue alors qu'elle augmente en B. On atteint la limite lorsque la force est nulle en A (la roue arrière ne s'appuie plus sur le sol) et que toute la charge "P-M.a" se reporte en B sur la roue avant. La moto est alors "en équilibre" (elle roule quand même !) sous l'action de deux forces, opposées et dirigées suivant la même droite (BG). C'est la situation limite la plus fréquente, sur piste sèche.


{kind=link}