
Cherchons à tracer l'épure d'une moto en nous donnant un cahier des charges géométrique.
On peut commencer par définir :

- la taille des roues
- l'empattement
- l'angle de chasse
- la chasse au sol


Définissons la longueur initiale de l'amortisseur et sa position d'ancrage sur le cadre.

J'ai choisi arbitrairement 3 positions sur un total de 130 mm de débattement :

- position initiale (0 mm)
- mi-course (65 mm et pas 62,5 idiot)
- fin de course (130 mm)
On choisi ensuite les longueurs correspondantes de l'amortisseur pour avoir la progressivité voulue.


Choisissons la position d'ancrage de la biellette sur le cadre.

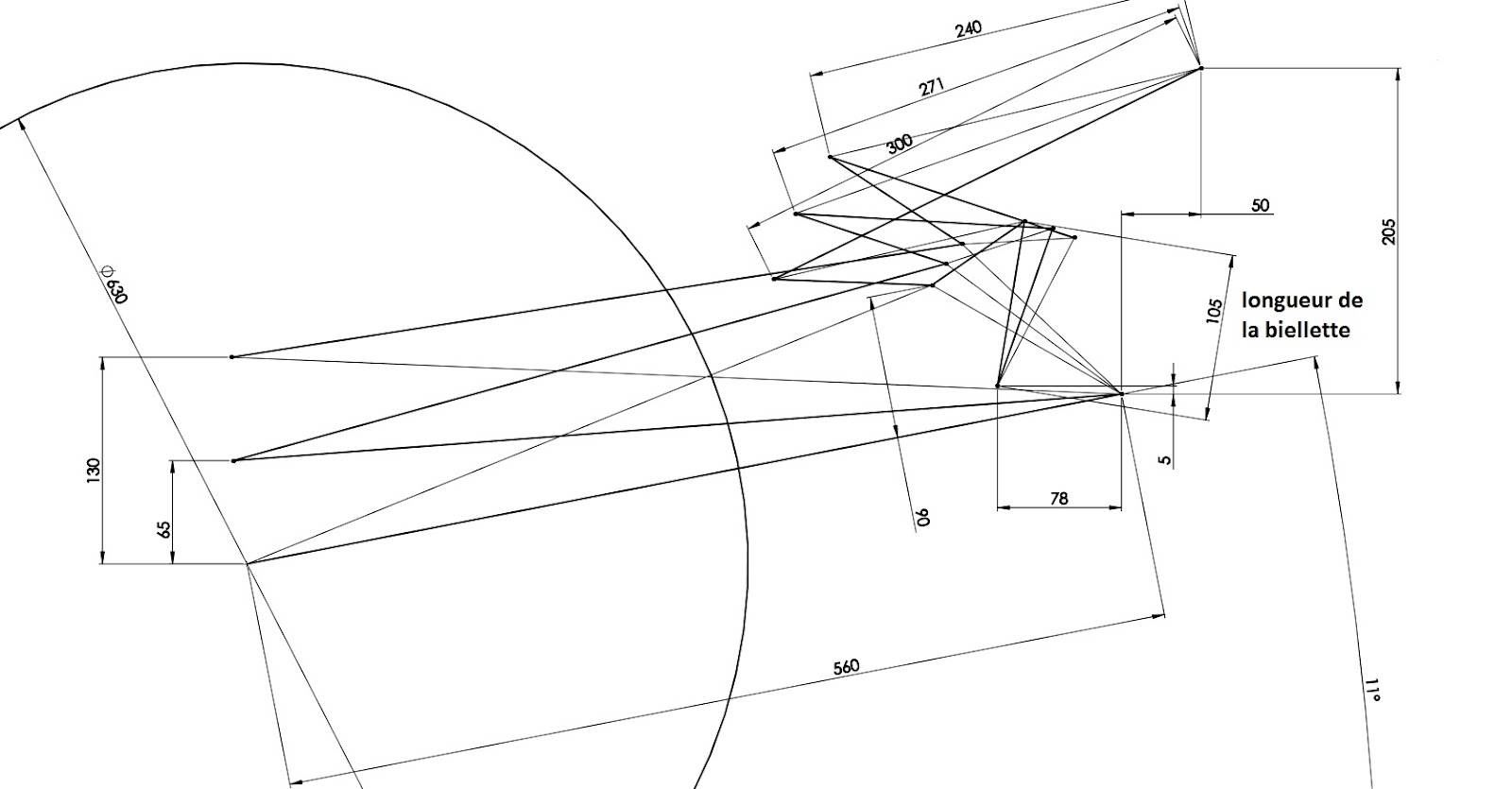
On a ainsi défini toute la géométrie de la suspension arrière.

On aurait pu tracer l'épure avec d'autres dimensions.
On pourrait définir aussi un nombre plus important de positions du bras oscillant. Ceci aurait pour conséquence des valeurs imposées pour plus de paramètres alors qu'ici, certaines valeurs ont été choisies arbitrairement.
Avec le même schéma cinématique de départ on peut bien sûr modifier fortement le mécanisme tout en conservant un débattement et une progressivité identique.
On peut faire ceci :
Là c'est vraiment du grand n'importe quoi. Les pièces se télescopent joyeusement, la biellette travaille en compression lors de l'enfoncement...mais c'est virtuellement la même cinématique !
On peut aussi construire le mécanisme suivant :
Et on voit qu'on se rapproche maintenant du schéma adopté par Yamaha sur la 1000 R1 sauf que la biellette et le basculeur sont inversés (sur une R1, la biellette est liée au bras oscillant et le basculeur au cadre).
Le choix du mécanisme dépend d'un certain nombre de facteurs.
Techniques : formes et dimensions du moteur, facilités de réglage (par exemple en jouant sur la longueur de la biellette), encombrement et poids (parfois on est obligé de mettre deux biellettes en parallèle, de part et d'autre de l'amortisseur)...etc.
Esthétiques : amortisseur très visible ou non, inclinaison, intégration aux autres formes de la moto...etc.
Economiques : nombre de pièces, complexité des formes (plaques découpées, pièces de fonderie, pièces usinées), présence de roulements...etc.
8 commentaires:
Bonjour Monsieur Stéphane Meunier, je vous écris ce commentaire afin d'avoir des explications et surtout des suggestions concernant la position du centre de gravité de la KAWASAKI ZX10R.
Je vous remercie par avance de pouvoir me répondre.
Bonjour, je ne vais pas pouvoir vous aider car je n'ai pas accès aux données de l'usine Kawasaki. Il est sans doute assez proche du milieu de la moto (répartition 50 / 50 avec pilote) mais la position en hauteur n'est inconnue. Si vous avez une moto comme celle-ci vous pouvez trouver la position de G avec une balance et effectuer deux pesées : une 1ère en plaçant la moto horizontale et une seconde moto inclinée (soulevée sur un support à l'avant ou à l'arrière).
Bonjour M.Meunier, je vous remercie pour votre réponse. J'ai pas précisé que je cherche le centre de gravité du bras oscillant pour pouvoir faire une course sans soucis.
Je vous remercie encore une fois pour votre bienveillante attention.
Cordialement
Bonjour. Dans ce cas vous devez l'avoir ce bras oscillant. Vous pouvez donc facilement déterminer son centre de gravité.
Bonjour, je travail sur la modélisation du train arrière et j'ai à disposition le dessin et quelques mesures des différentes partie de la moto(basculeur,bras oscillant, diamètre de la roue...). Est ce que c'est possible de me suggérer une méthode pour avoir le CDG.
Mercie par avance.
Bonjour, je suis étudiant et je travail sur un projet de modélisation du train arrière d'une moto.Et pour le moment j'ai le dessin et des mesures de quelque partie du train arrière (Basculeur, Bras oscillant, roues).
et mon objectif c'est de régler le centre de gravité( je sais pas lequel est ce celui du bras ou de la moto) d'une façon qu'il ne soit pas trop bas ni trop haut.
Je vous remercie par avance.
Cordialement
Bonjour Mr Meunier,
Les valeurs que vous avez utilisé pour votre animation sont exactement celles du zx10r 2011 ? Cordialement Tony
Bonjour,
non ces valeurs ne sont sans doute pas exactement les bonnes...mais pas loin !
Je n'ai pas accès aux données de Kawasaki et je n'ai rien mesuré sur la vraie moto.
Tout provient de photos retrouvées sur le web.
Enregistrer un commentaire