
Recherche personnalisée
24 novembre 2012
24 août 2012
Caméra embarquée sur la Metiss à Magny-Cours
En prévision des 24H du Mans, la Metiss a roulé sur le circuit de Magny-Cours.
D'abord quelques tours de rodage puis le rythme devient plus soutenu.....ça dépote !
30 mai 2012




28 mai 2012
























16 mai 2012
Dessiner une moto (épure et suspension arrière)
Reprenons le schéma de la Kawasaki ZX10R du précédent post.
Cherchons à tracer l'épure d'une moto en nous donnant un cahier des charges géométrique.
On peut commencer par définir :

 Choisissons la longueur et l'angle de bras oscillant par rapport à l'horizontale :
Choisissons la longueur et l'angle de bras oscillant par rapport à l'horizontale :

Définissons la longueur initiale de l'amortisseur et sa position d'ancrage sur le cadre.
 On peut accessoirement fixer la hauteur au niveau de la colonne de direction. La cote de déport des tés (27 mm environ) est ici une conséquence des choix précédents. En effet, diamètre de roue, chasse, angle de chasse et déport sont liés. Le choix de 3 paramètres impose le 4ème.
On peut accessoirement fixer la hauteur au niveau de la colonne de direction. La cote de déport des tés (27 mm environ) est ici une conséquence des choix précédents. En effet, diamètre de roue, chasse, angle de chasse et déport sont liés. Le choix de 3 paramètres impose le 4ème.
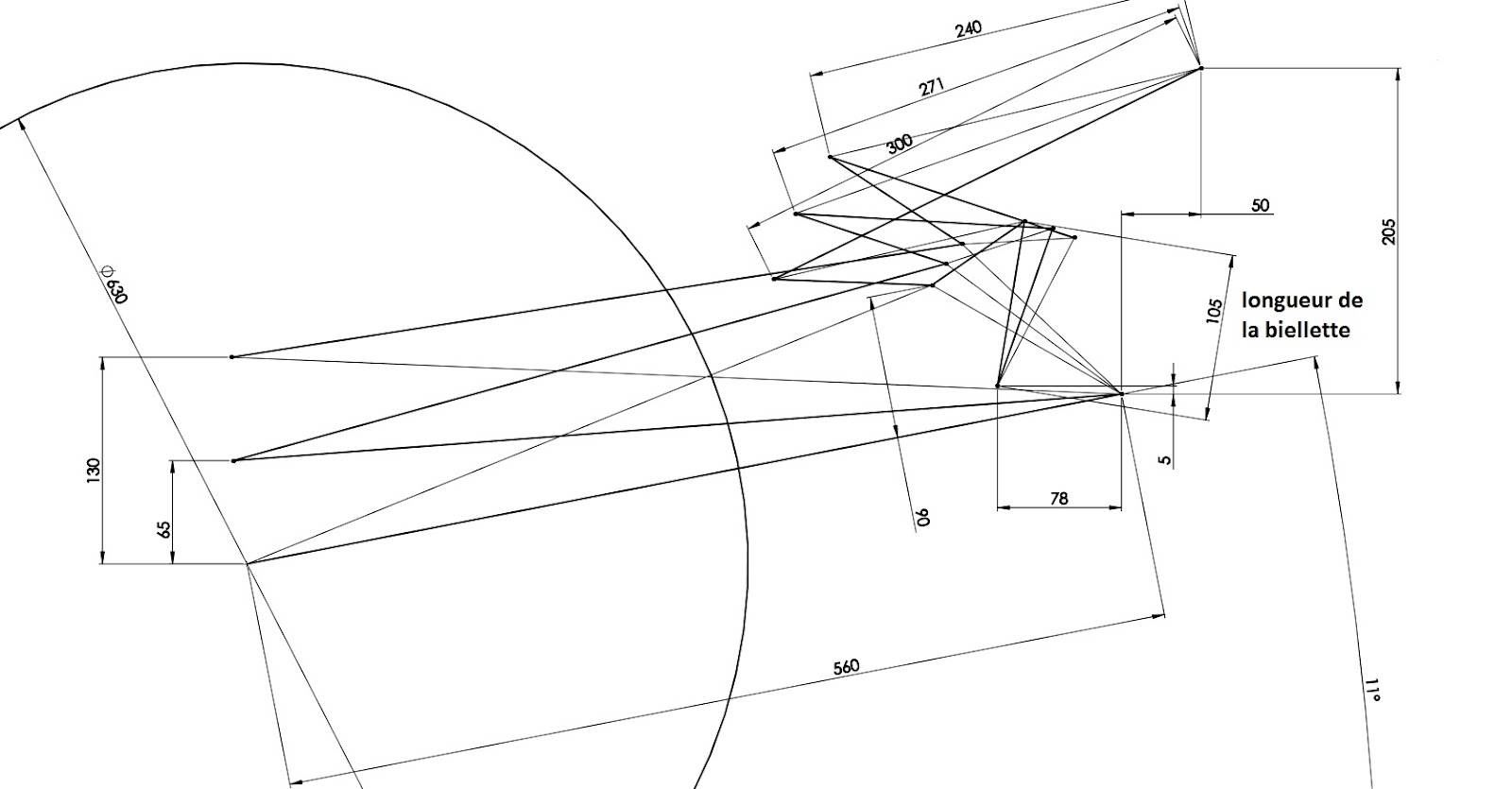
Traçons maintenant le bras oscillant dans plusieurs positions entre la position initiale et la position d'enfoncement maxi.
J'ai choisi arbitrairement 3 positions sur un total de 130 mm de débattement :

On choisi ensuite les longueurs correspondantes de l'amortisseur pour avoir la progressivité voulue.
 Par exemple 29 mm d'enfoncement sur la première moitié puis 31 mm sur la deuxième partie de la course, soit un enfoncement total de 60 mm de l'amortisseur pour 130 mm à la roue.
Par exemple 29 mm d'enfoncement sur la première moitié puis 31 mm sur la deuxième partie de la course, soit un enfoncement total de 60 mm de l'amortisseur pour 130 mm à la roue.

Choisissons la position d'ancrage de la biellette sur le cadre.
 Puis la position de l'articulation du basculeur sur le bras oscillant.
Puis la position de l'articulation du basculeur sur le bras oscillant.
 Et enfin la longueur de la biellette.
Et enfin la longueur de la biellette.
On a ainsi défini toute la géométrie de la suspension arrière.
 L'outil CAO permet de s'appuyer sur l'esquisse obtenue. Cette esquisse "pilote" les dimensions des pièces : bras oscillant, basculeur, biellette...etc.
L'outil CAO permet de s'appuyer sur l'esquisse obtenue. Cette esquisse "pilote" les dimensions des pièces : bras oscillant, basculeur, biellette...etc.
On aurait pu tracer l'épure avec d'autres dimensions.
On pourrait définir aussi un nombre plus important de positions du bras oscillant. Ceci aurait pour conséquence des valeurs imposées pour plus de paramètres alors qu'ici, certaines valeurs ont été choisies arbitrairement.
Avec le même schéma cinématique de départ on peut bien sûr modifier fortement le mécanisme tout en conservant un débattement et une progressivité identique.
On peut faire ceci :
Là c'est vraiment du grand n'importe quoi. Les pièces se télescopent joyeusement, la biellette travaille en compression lors de l'enfoncement...mais c'est virtuellement la même cinématique !
On peut aussi construire le mécanisme suivant :
Et on voit qu'on se rapproche maintenant du schéma adopté par Yamaha sur la 1000 R1 sauf que la biellette et le basculeur sont inversés (sur une R1, la biellette est liée au bras oscillant et le basculeur au cadre).
Le choix du mécanisme dépend d'un certain nombre de facteurs.
Techniques : formes et dimensions du moteur, facilités de réglage (par exemple en jouant sur la longueur de la biellette), encombrement et poids (parfois on est obligé de mettre deux biellettes en parallèle, de part et d'autre de l'amortisseur)...etc.
Esthétiques : amortisseur très visible ou non, inclinaison, intégration aux autres formes de la moto...etc.
Economiques : nombre de pièces, complexité des formes (plaques découpées, pièces de fonderie, pièces usinées), présence de roulements...etc.
Cherchons à tracer l'épure d'une moto en nous donnant un cahier des charges géométrique.
On peut commencer par définir :

- la taille des roues
- l'empattement
- l'angle de chasse
- la chasse au sol


Définissons la longueur initiale de l'amortisseur et sa position d'ancrage sur le cadre.

J'ai choisi arbitrairement 3 positions sur un total de 130 mm de débattement :

- position initiale (0 mm)
- mi-course (65 mm et pas 62,5 idiot)
- fin de course (130 mm)
On choisi ensuite les longueurs correspondantes de l'amortisseur pour avoir la progressivité voulue.


Choisissons la position d'ancrage de la biellette sur le cadre.

On a ainsi défini toute la géométrie de la suspension arrière.

On aurait pu tracer l'épure avec d'autres dimensions.
On pourrait définir aussi un nombre plus important de positions du bras oscillant. Ceci aurait pour conséquence des valeurs imposées pour plus de paramètres alors qu'ici, certaines valeurs ont été choisies arbitrairement.
Avec le même schéma cinématique de départ on peut bien sûr modifier fortement le mécanisme tout en conservant un débattement et une progressivité identique.
On peut faire ceci :
Là c'est vraiment du grand n'importe quoi. Les pièces se télescopent joyeusement, la biellette travaille en compression lors de l'enfoncement...mais c'est virtuellement la même cinématique !
On peut aussi construire le mécanisme suivant :
Et on voit qu'on se rapproche maintenant du schéma adopté par Yamaha sur la 1000 R1 sauf que la biellette et le basculeur sont inversés (sur une R1, la biellette est liée au bras oscillant et le basculeur au cadre).
Le choix du mécanisme dépend d'un certain nombre de facteurs.
Techniques : formes et dimensions du moteur, facilités de réglage (par exemple en jouant sur la longueur de la biellette), encombrement et poids (parfois on est obligé de mettre deux biellettes en parallèle, de part et d'autre de l'amortisseur)...etc.
Esthétiques : amortisseur très visible ou non, inclinaison, intégration aux autres formes de la moto...etc.
Economiques : nombre de pièces, complexité des formes (plaques découpées, pièces de fonderie, pièces usinées), présence de roulements...etc.
14 mai 2012
Suspension arrière Kawasaki ZX10R
Après quelques images de la Kawasaki ZX10R voici une animation de sa suspension arrière.
L'amortisseur est disposé en position quasi horizontale. Le basculeur (en rouge sur la vidéo) est enfermé dans le caisson du bras oscillant et une biellette de traction (en vert) relie ce basculeur au cadre.
30 avril 2012
15 avril 2012
Bol d'or 2012 : du vert malgré la pluie !
Carton plein pour Kawasaki avec la victoire au classement général et EWC de la n°11 de DA COSTA, FOUR, LEBLANC et JONCHIERE et la victoire en Stocksport de la n°24 de DEBISE, DELEGUE, HOLUB et BLANCHET.
Bravo à SRC KAWASAKI et à 3D ENDURANCE.
J'en profite pour glisser quelques images de la Kawasaki ZX10R 2011 :







Cette Kawasaki est assez conventionnelle dans sa conception, comparée aux autres sportives du moment chez Honda, Yamaha, Suzuki ou BMW.
Son originalité s situe au niveau de l'implantation de l'amortisseur arrière. Celui-ci est presque horizontal. Le basculeur se retouve "enfermé" dans le bras oscillant.
11 mars 2012
John Mc Guinness sur Honda au TT Zero 2012
 Avec comme pilote John Mac Guinness, 17 fois vainqueur au TT, la Honda électrique s'annonce comme une redoutable concurrente face aux américaines MOTOCZYSZ, LIGHTNING et MISSION MOTORS.
Avec comme pilote John Mac Guinness, 17 fois vainqueur au TT, la Honda électrique s'annonce comme une redoutable concurrente face aux américaines MOTOCZYSZ, LIGHTNING et MISSION MOTORS.On annonce d'après asphaltandrubber.com un moteur triphasé brushless d'une puissance de 90 kW et un pack de batteries lithium-ion d'au moins 370 V. La masse de la moto serait de 260 kg.
Une moto lourde, donc, mais puissante, et capable d'emmener ce cher John au delà de la barre des 100 MPH de moyenne au prochain TT Zero.
La puissance annoncée n'est pas exceptionnelle mais les chiffres, surtout en électrique, sont à prendre avec des pincettes....voire des baguettes dans le cas présent !
 Détail technique : à propos de l'ancrage de bras oscillant, il semblerait que la Honda Mugen de course n'ait pas retenu la solution du prototype original. On avait initialement un ancrage dans l'axe du pignon moteur.
Détail technique : à propos de l'ancrage de bras oscillant, il semblerait que la Honda Mugen de course n'ait pas retenu la solution du prototype original. On avait initialement un ancrage dans l'axe du pignon moteur. On a désormais une fixation plus classique avec un pignon et un axe de bras qui ne sont pas coaxiaux. C'est mieux ainsi !


Quelques images supplémentaires :



Inscription à :
Articles (Atom)