
Un petit tour en satellite avec Google Maps...





 Son bébé : la RenNa.
Son bébé : la RenNa.










 l'intensité du freinage augmente, les forces s'inclinent encore plus. L'intensité de la force en A diminue alors qu'elle augmente en B. On atteint la limite lorsque la force est nulle en A (la roue arrière ne s'appuie plus sur le sol) et que toute la charge "P-M.a" se reporte en B sur la roue avant. La moto est alors "en équilibre" (elle roule quand même !) sous l'action de deux forces, opposées et dirigées suivant la même droite (BG). C'est la situation limite la plus fréquente, sur piste sèche.
l'intensité du freinage augmente, les forces s'inclinent encore plus. L'intensité de la force en A diminue alors qu'elle augmente en B. On atteint la limite lorsque la force est nulle en A (la roue arrière ne s'appuie plus sur le sol) et que toute la charge "P-M.a" se reporte en B sur la roue avant. La moto est alors "en équilibre" (elle roule quand même !) sous l'action de deux forces, opposées et dirigées suivant la même droite (BG). C'est la situation limite la plus fréquente, sur piste sèche.








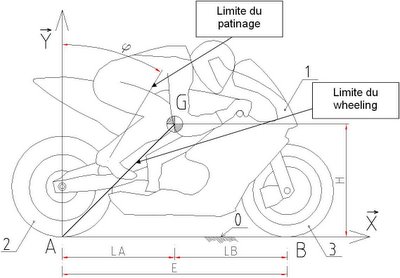
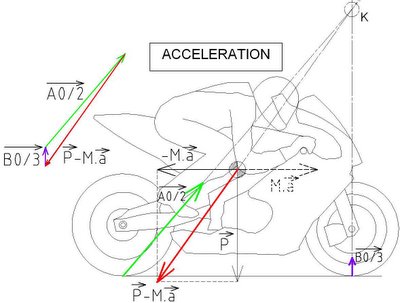
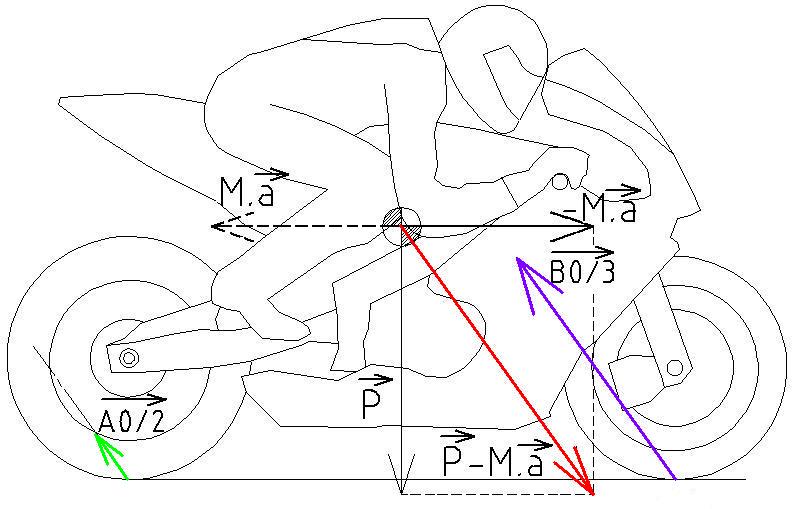
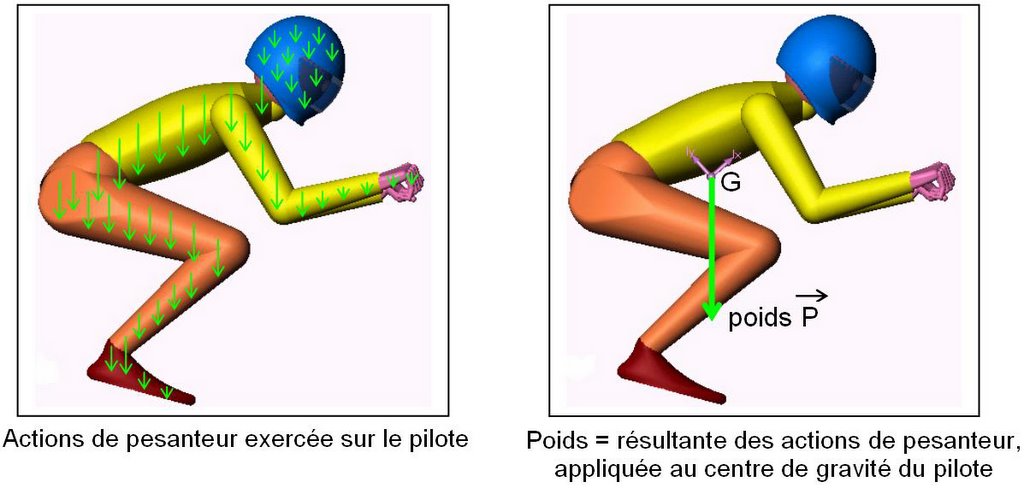
D'après le principe de la dynamique, la somme des forces appliquées est égale au produit de la masse par le vecteur accélération. On peut ramener ceci à un problème de "statique" à 3 forces concourantes (merci M. d'Alembert) en regroupant en une force le poids P et (- M.a).
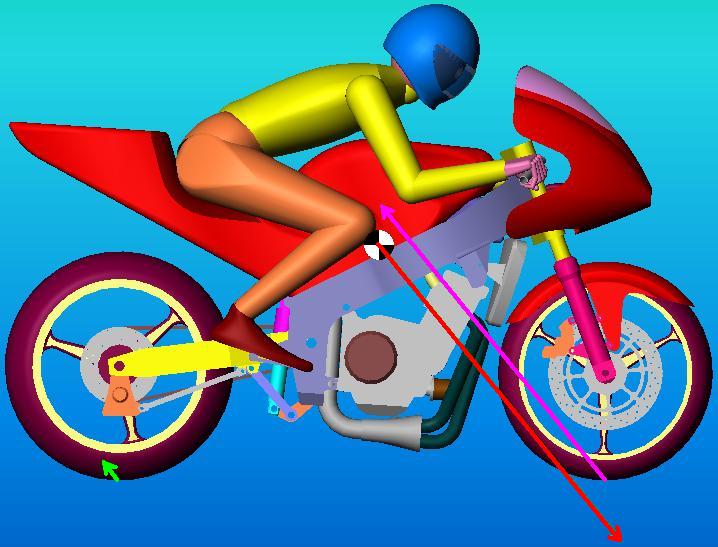
en vert : au point A, la force du sol sur le pneu arrière,
en violet : au point B, la force du sol sur le pneu avant,
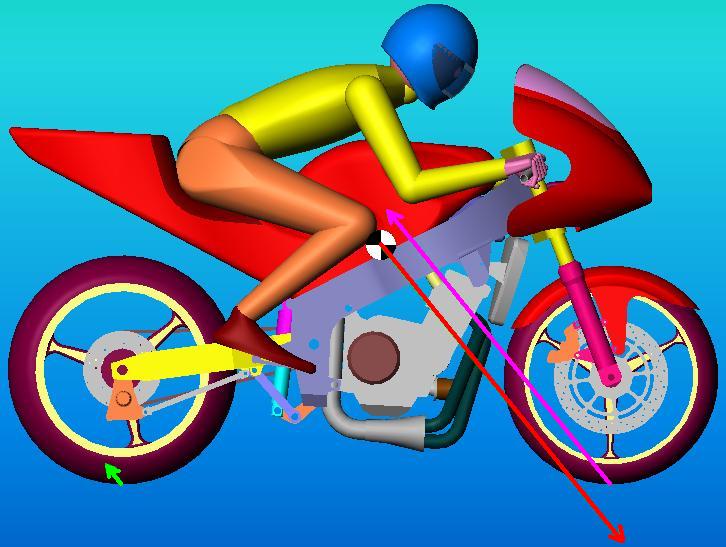
en rouge : au point G (centre de gravité), la force P-M.a (en vecteurs)
La somme vectorielle des 3 forces devant être nulle, on obtient le triangle ci-dessus quand on place les vecteurs bout-à-bout.
Voilà traité le cas de l'accélération (en négligeant les effets aérodynamiques).
On remarque (comme indiqué au paragraphe "adhérence") que la composante horizontale de la force verte est égale à M.a.
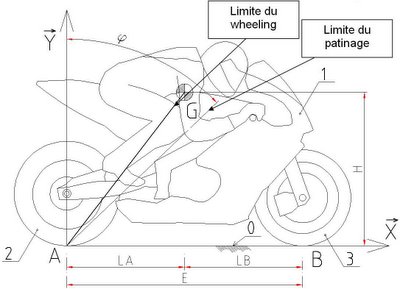
Donc plus on accélère, plus la force verte est penchée vers l'avant. En même temps, la force violette diminue quand l'accélération augmente. Le wheeling est obtenu quand cette force devient nulle. A ce moment, tout le poids est reporté sur l'arrière (transfert maxi) et on obtient deux forces opposées, sur la même droite support (AG).
La force verte ne peut pas être inclinée plus loin que cette droite (AG).
Si on cherche à accélérer plus fort, le wheeling ayant été amorcé, la moto se cabre de plus en plus, le centre de gravité "recule" de plus en plus, amplifiant le wheeling et on fait un beau soleil. Si on prend en plus en compte les effets aérodynamiques lorsque la moto est cabrée, on comprend bien qu'on peut se retourner comme une crêpe (demandez à un certain pilote Kawa lors du Bol 2005 !).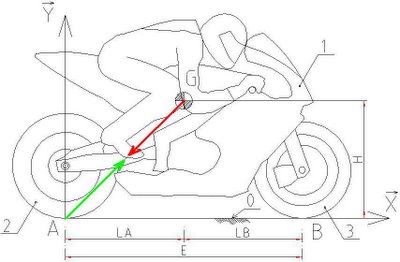
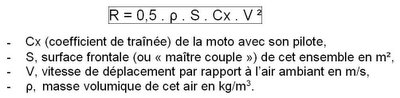
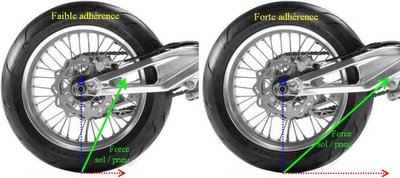 A la limite du patinage, la force est inclinée par rapport à la verticale d'un angle habituellement nommé "phi". La tangente de cet angle est le facteur de frottement (pour simplifier, on peut considérer que facteur de frottement et facteur d'adhérence sont identiques). Exemple : pour un facteur de 1, l'inclinaison maxi est de arctan(1) = 45 degrés. On apprend souvent à l'école que le facteur de frottement ne peut jamais dépasser 1 mais dans le cas du contact d'un pneu sur le sol il faut revoir sa copie. En effet, la déformation du pneu et son "adaptabilité" aux inégalités du sol réalisent un quasi "engrènement". L'adhérence peut donc être extrèmement forte, en particulier avec des pneus de compétition sur une piste sèche où on peut obtenir un facteur de l'ordre de 1,6 ! Ceci correspond à une inclinaison de 58 degrés ! Cela veut dire aussi que la composante horizontale de la force de contact peut être supérieure à la force verticale.
A la limite du patinage, la force est inclinée par rapport à la verticale d'un angle habituellement nommé "phi". La tangente de cet angle est le facteur de frottement (pour simplifier, on peut considérer que facteur de frottement et facteur d'adhérence sont identiques). Exemple : pour un facteur de 1, l'inclinaison maxi est de arctan(1) = 45 degrés. On apprend souvent à l'école que le facteur de frottement ne peut jamais dépasser 1 mais dans le cas du contact d'un pneu sur le sol il faut revoir sa copie. En effet, la déformation du pneu et son "adaptabilité" aux inégalités du sol réalisent un quasi "engrènement". L'adhérence peut donc être extrèmement forte, en particulier avec des pneus de compétition sur une piste sèche où on peut obtenir un facteur de l'ordre de 1,6 ! Ceci correspond à une inclinaison de 58 degrés ! Cela veut dire aussi que la composante horizontale de la force de contact peut être supérieure à la force verticale. 
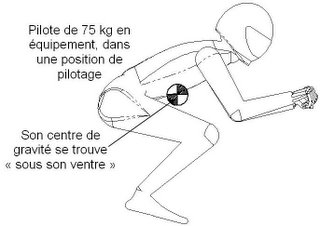
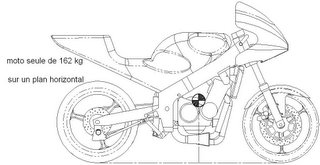
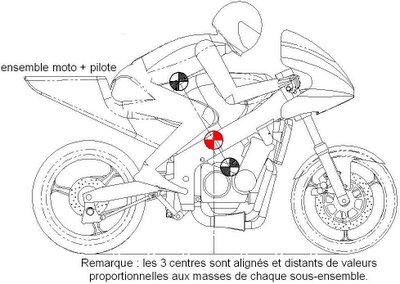
Parler de répartition avant / arrière d'une moto seule, sans son pilote n'a guère d'intérêt. En effet, il serait beaucoup plus utile de connaitre les chiffres avec un conducteur dans 2 ou 3 positions caractéristiques (droit, un peu penché, couché...) avec éventuellement la présence d'un passager pour avoir une bonne idée du comportement routier de la machine. Il suffit de peu de pratique pour se rendre compte que la position de conduite sur la moto a une très grande influence. La hauteur de selle est donc à connaitre mais aussi la position avant/arrière de l'assise...même si, encore une fois, le pilote doit beaucoup se déplacer sur sa machine pour être efficace (suivant les phases d'accélération, freinage ou virage).
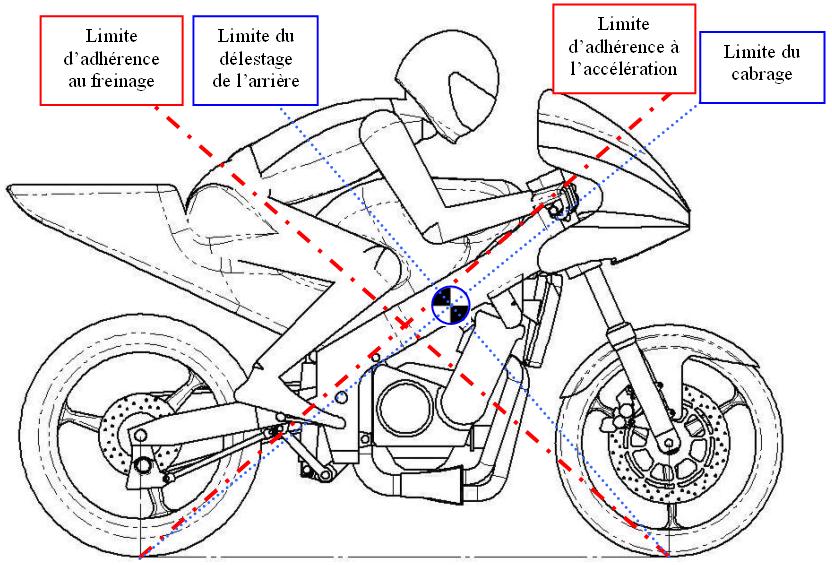
Cette notion de centre de gravité étant acquise, je vous montrerai plus tard comment évaluer les limites d'adhérence, de cabrage à l'accélération ou de décollage de l'arrière au freinage...



{kind=link}
{kind=link}
{kind=link}
{kind=link}